Convolutional (Conv) layer
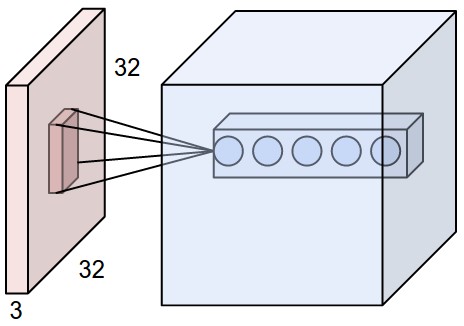
Accepts as input:
- feature vector of size
- filters of size
- biases of length
- stride
- amount of zero padding
source
Stride
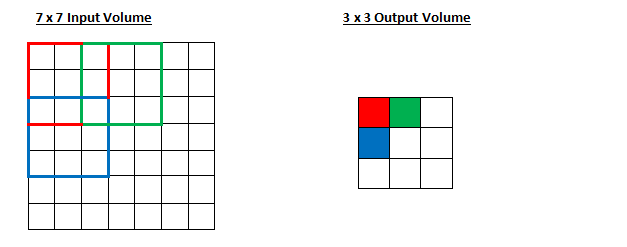
The amount by which a filter shifts spatially when convolving it with a feature vector.
source
image source
Dilation
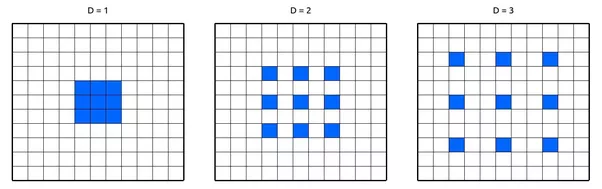
A filter is dilated by a factor
by inserting in every one of its channels independently
zeros between the filter elements.
source
image source
Fully connected (FC) layer
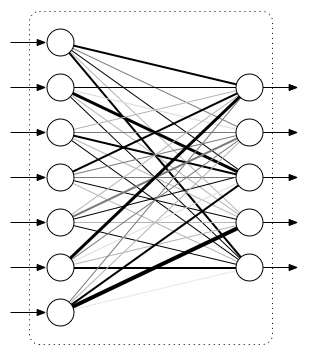
In practice, FC layers are implemented using a convolutional layer.
To see how this might be possible, note that when an input feature vector of size
is convolved with a filter bank of size
, it results in an output feature vector of size
.
Since the convolution is valid and the filter can not move spatially, the operation is equivalent to a fully connected one.
More over, when this feature vector of size 1x1xD_2 is convolved with another filter bank of size
, the result is of size
.
In this case, again, the convolution is done over a single spatial location and therefore equivalent to a fully connected layer.
source
image source
Linear classifier
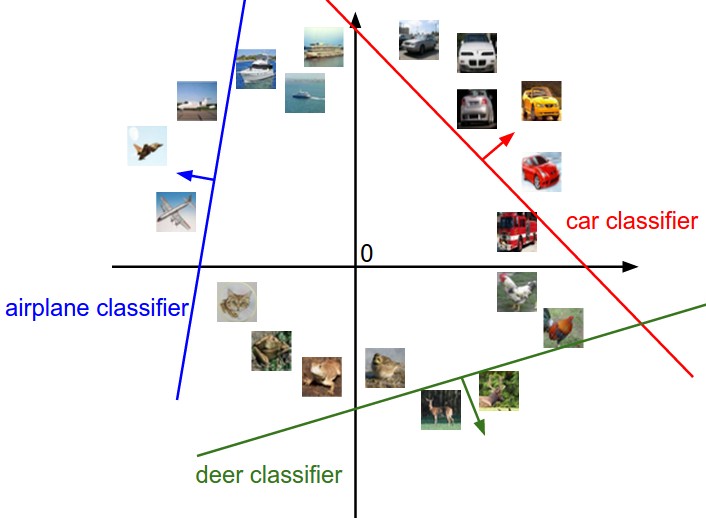
This is implemented in practice by employing a fully connected layer of size
, where
is the number of classes.
Each one of the filters of size
corresponds to a certain class and there are
classifiers, one for each class.
image source